- Home
- 工法・システム概要
工法・システム概要
工法の概要
本工法は、呼び径200~400mmの塩ビ管を推進施工するもので、発進立坑に推進装置を設置し、地上の汚水処理装置で調整した泥水を還流し切羽の安定をはかりながらカッタで掘削、その掘削した土砂を排水ポンプで地上へ流体輸送する泥水式塩ビ管推進工法です。
工法の特長
- 従来の塩ビ管推進機の主流であるオーガタイプや圧入方式に比べ、長距離推進が効率よく施工できます。
- 礫・玉石用カッタとコーンクラッシャ機構により、砂礫層の施工ができます。
- 油圧モータによる大きなカッタトルクと442kNの推進力で施工ができます。
- テレビカメラによるターゲットの監視と4本の油圧方向修正ジャッキで、正確な施工管理ができます。
- ターゲット、各種センサ等により、推進中の情報を中央操作盤にて監視ができるため、施工管理が正確に行えます。
- ケーシングに直接推進力をかけるため、塩ビ管に直接負担をかける事がありません。
- 送・排泥管はケーシング内に装備してあるため、塩ビ管を傷つける心配がありません。
- 直径2mの小型立坑から発進できます。
- 先導体は4分割式となっており、1号人孔での回収が可能です。(φ350・400の場合は2号人孔)
- 機内バイパス弁の装備により、帯水層はもとより、広範囲な地盤に対応できます。
システム概要
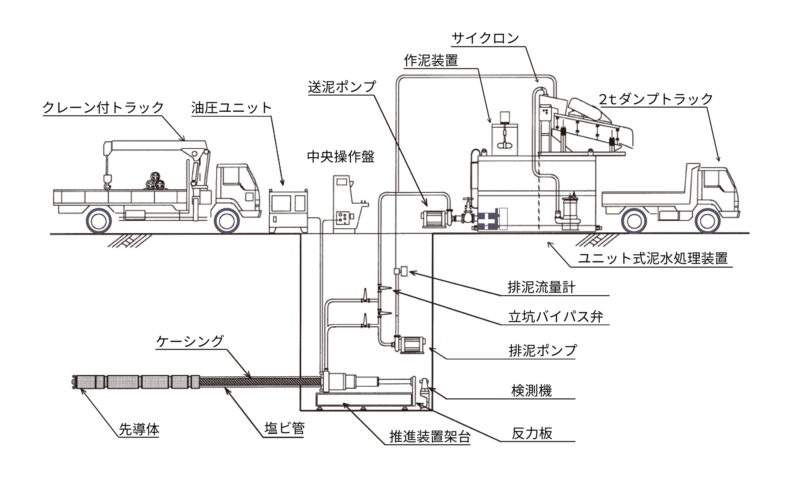
先導体の構造
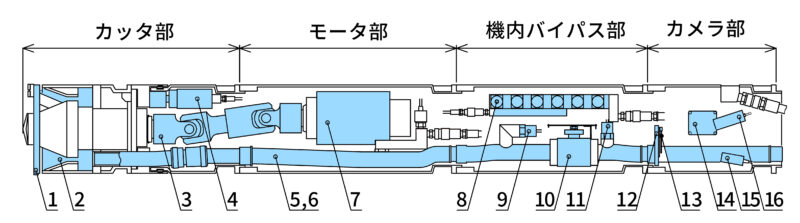
1: カッタディスク 2:破砕室 3:ユニバーサルシャフト 4:方向修正ジャッキ 5:送泥管 6:排泥管 7:油圧モータ 8:電磁弁 9:排泥圧センサ 10:バイパス弁 11:送泥圧センサ 12:ターゲット 13:ローリング計 14:ピッチング計 15:ライト 16:CCDカメラ
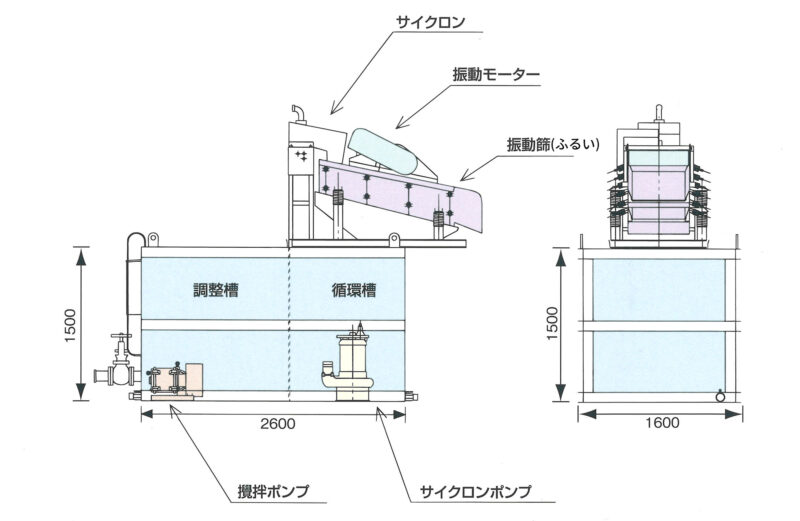
泥水処理装置